DIP_review_2_1(1)
DIP_review_2_1 - Frequency Domain Filtering(1)
1.Fourier Transform formula
- Four types of Fourier Transform
-
时域非周期 时域周期 频域非周期 CTFT(时间频域均连续) FS(CT,频域离散,时域连续) 频域周期 DTFT(时间离散,频域连续) DFT(DT,时间频域均离散) - FS(CT) => 频率离散且无周期
- 时间连续且周期
- CTFT => 时间连续且非周期
- 频率连续且非周期
- DTFT => 时间离散且非周期
- 频率连续且周期
- DFT(数字图像处理,实际上也就是DT) =>
- FS(DT\IDFT) =>
- DT 与 IDFT, DFT 与 DT求取a_k, 二者本质相同!!!
- FS(CT) => 频率离散且无周期
-
- 2D DFT and IDFT
- DFT
- IDFT
- basis function => !!!
- Related calculation: 2D DFT in polar form:
- Fourier spectrum(频谱):
- 反映不同frequency的幅度
- Phase angle(相角):
- 反映空间位置信息,对于图片来说相角信息比频谱信息更加重要,所以对图片处理时,我们要注意对相角的偏移和影响
- Power spectrum(功率谱):
- 总能量
- DC component(直流分量):
- 反应图片的整体平均亮度,对于图片的亮度影响较大
物体轮廓在低频,特征在高频
- Fourier spectrum(频谱):
2.Sampling
- 1D sampling
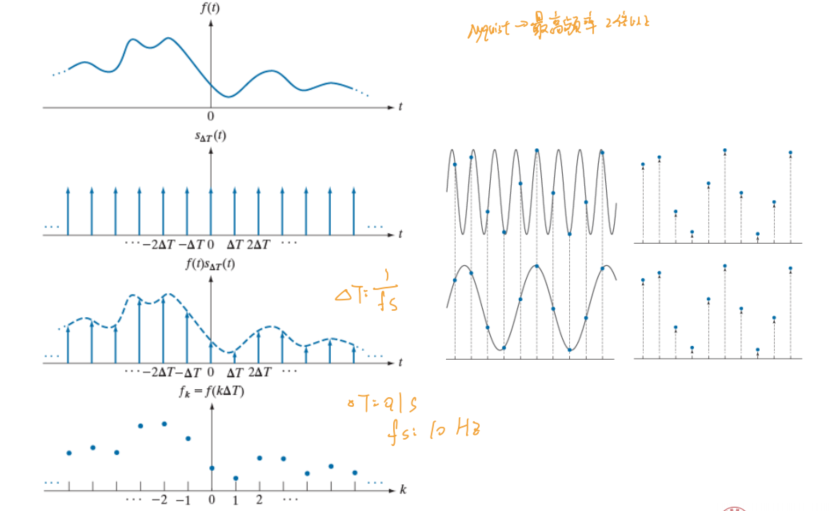
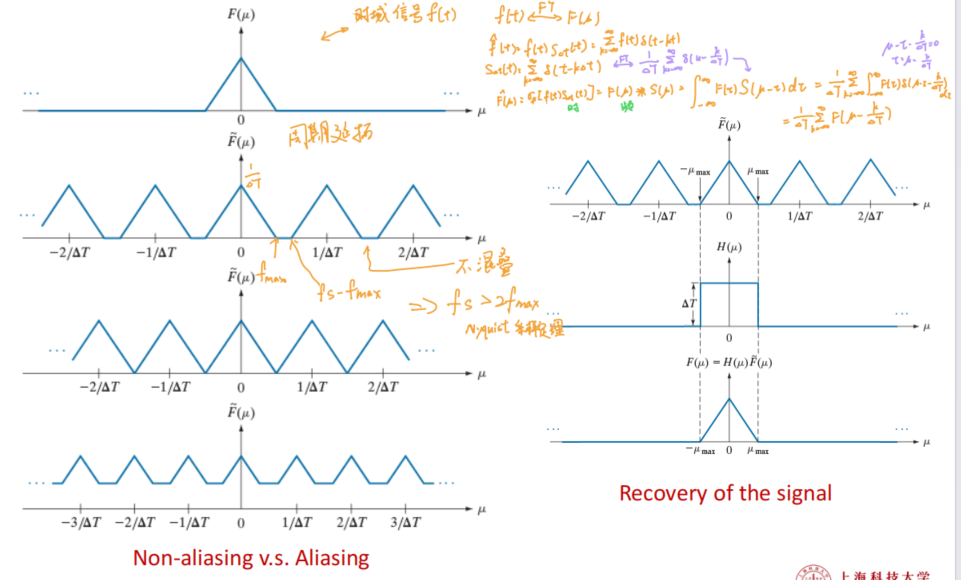
- 存在 Aliasing problem 当
- 采样信号 频率
- 采样变成周期性延拓
- 时域转为频域卷积,同时结果表现为频率域也出现周期性延拓
- 2D sampling
- 采样信号
3.Fourier Transform property
-
Translation
- 同时可以通过频域平移简化FFTshift的操作 当
-
Periodicity
- 可以参考matlab 镜像填充选择circular参数时效果
-
Rotation(极坐标)
-
Symmetry(注意数字信号为所以在的基础上判断对称性)
-
以对称 以对称 偶函数even 奇函数odd 共轭对称(f(x,y)real) 共轭反对称 (f(x,y)imaginary) - f(x,y)real 实部偶,虚部奇
- f(x,y)实且偶 F(u,v)实且偶, 此时相位为0,不改变相位!!
- f(x,y)实且奇 F(u,v)虚且奇,此时相位为90,容易补偿相位!!
-
-
2D Convolution theorem
- padding
- 保证卷积结果正确
- 确保可以进行FFT
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.