DIP_review_2_1(2)
DIP_review_2_1 - Frequency Domain Filtering(2)
Discrete Convolution Theorem
- Convolution theorem
- Wraparound problem
- 数字信号在时域为周期信号,会产生周期性延拓,因此卷积会存在循环卷积的问题,并非得到线性卷积
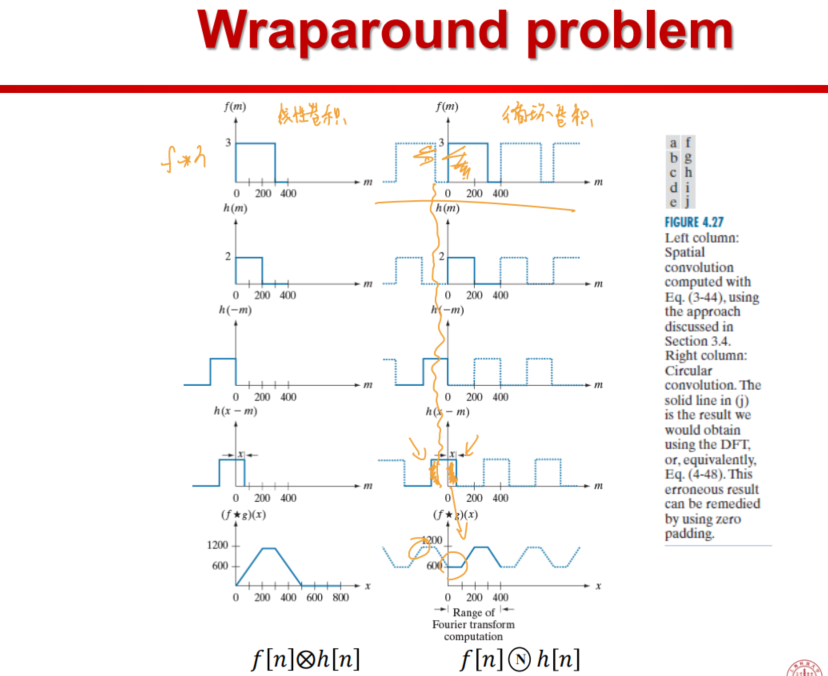
- 线性卷积(Linear convolution)
- 循环卷积
- 当,循环卷积是线性卷积长度为L的混叠
- 当,循环卷积=线性卷积
- 当,循环卷积是线性卷积末尾补L-(N+M-1)个零
- 周期卷积
- 周期卷积是线性卷积以一定序列长度(L)为周期的周期延拓
- 对周期卷积取主值序列得到循环卷积
- 线性卷积(Linear convolution)
- 利用zero padding来人为的改变周期,最终使得线性卷积等于循环卷积得到的结果
Frequency domain filtering
-
Introduction
- Basic Filtering form:
- 一般选择中心为,而并非
- 一般也会进行padding后再进行卷积处理
- Steps for frequency domain filtering
-
- 给定input image , 大小,进而得到padding的参数
P = 2M, Q = 2N
- 给定input image , 大小,进而得到padding的参数
-
- padding得到
-
- Implement FFTshift, by multiplying to center the transform(负数置为0)
-
- Compute the DFT 得到
-
- 生成一个实对称过滤器*, , 大小为 且中心为(padding + fftshift + DFT)
-
- , using array multiplication(vector operation)
-
-
- cut off padding region to get final result with size of
-
- 在频率域上设计滤波器eg.
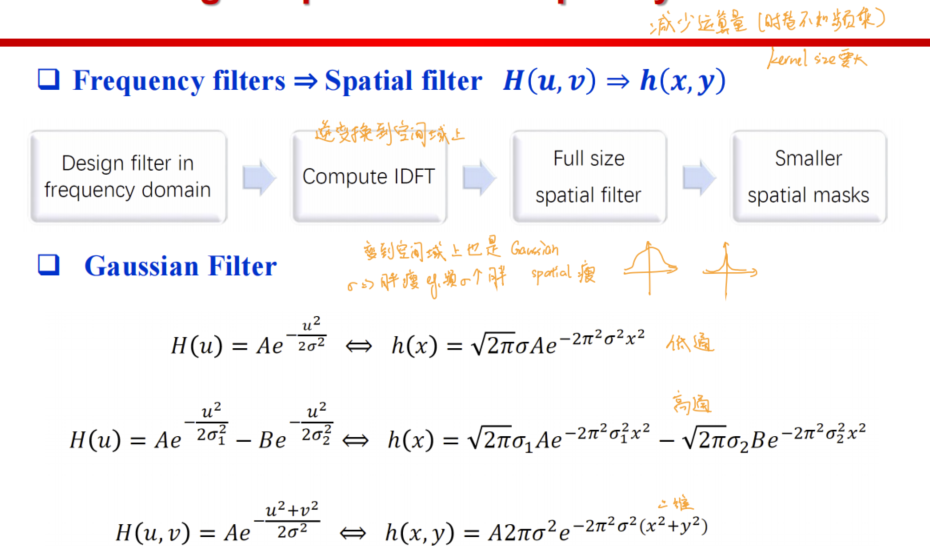
-
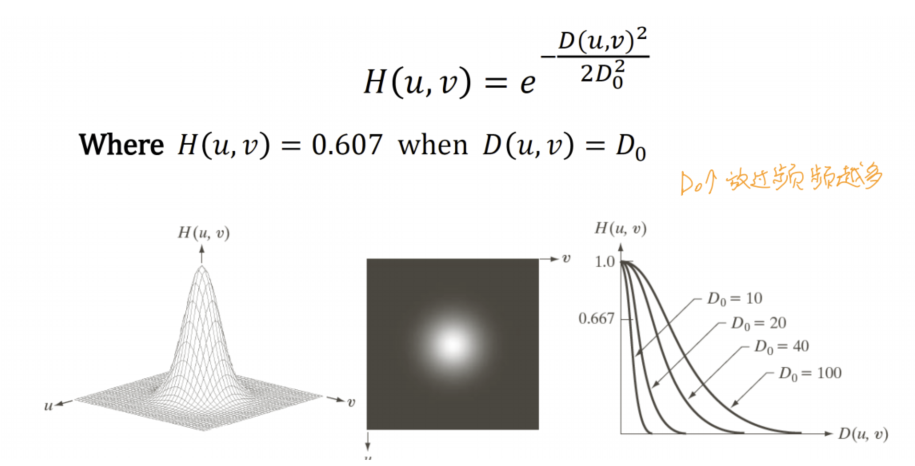
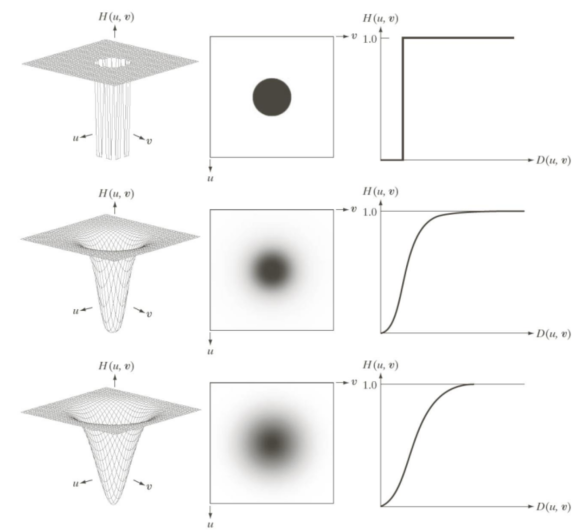
Typical Lowpass filtering: 提高截止频率,使得滤波得到的图像更加清晰
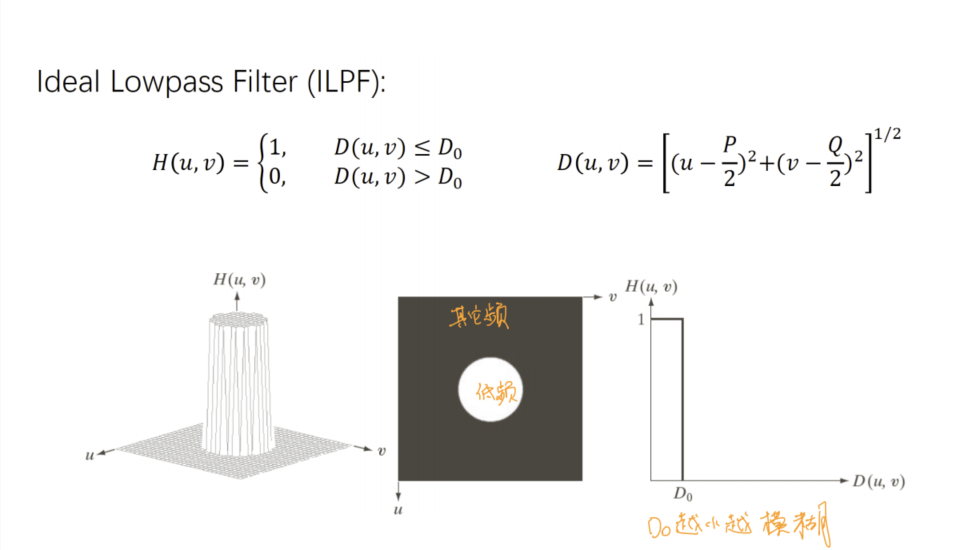
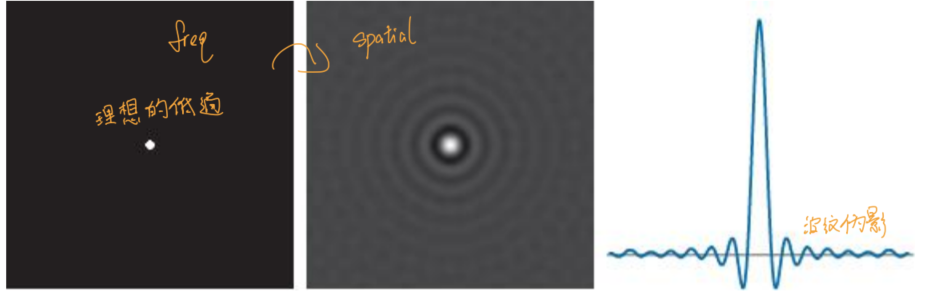
- Ideal Lowpass filter
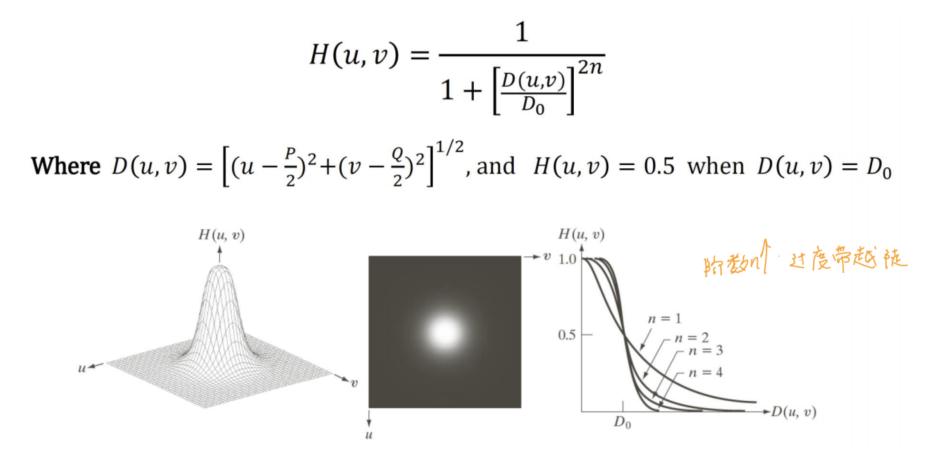
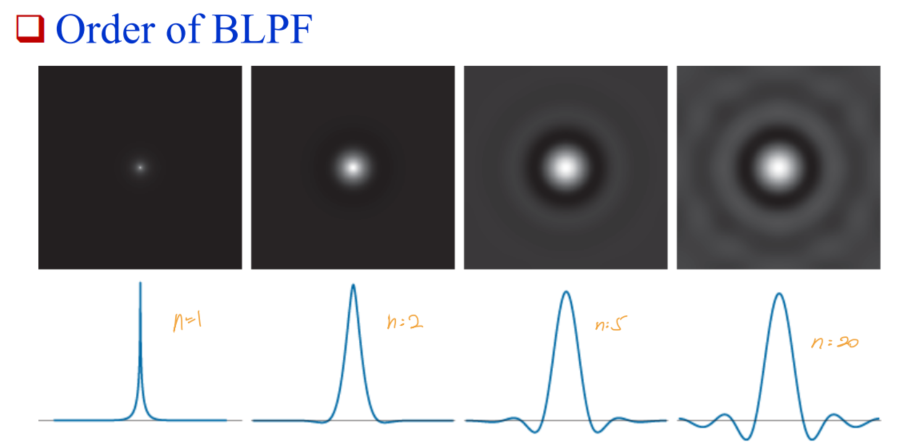
- Butterworth Lowpass filter
- Gaussian Lowpass filter
- 现实应用场景: ps, 低通滤波除去皱纹,通过模糊来使图像更光滑,达到磨皮效果
- Ideal Lowpass filter
-
Typical Highpass filtering: : 提高,会滤走更多的能量
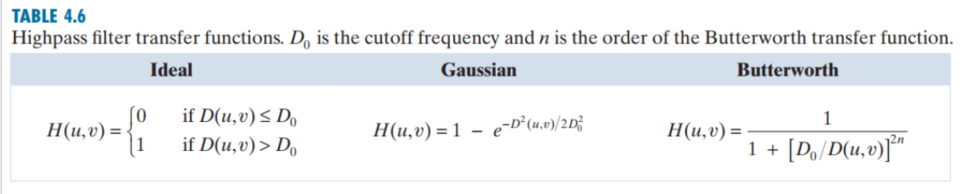
-
Other filtering
-
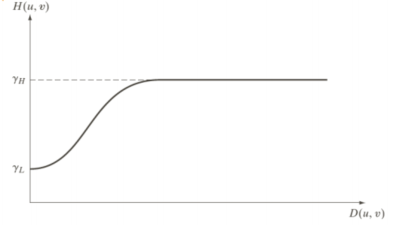
同态滤波(Homomorphic Filtering)
- , 其中
i表示光照,r表示达到位置对光的反射能力 - 基于高斯的HPF: ,前半部分的系数来定义滤波器高频成分的放过系数
- 最终保留反射的高频成分
- 适用场景:光照不均匀 or 光照变化缓慢
- 优势:使得照明更加均匀 and 增加阴影的对比度
- , 其中
-
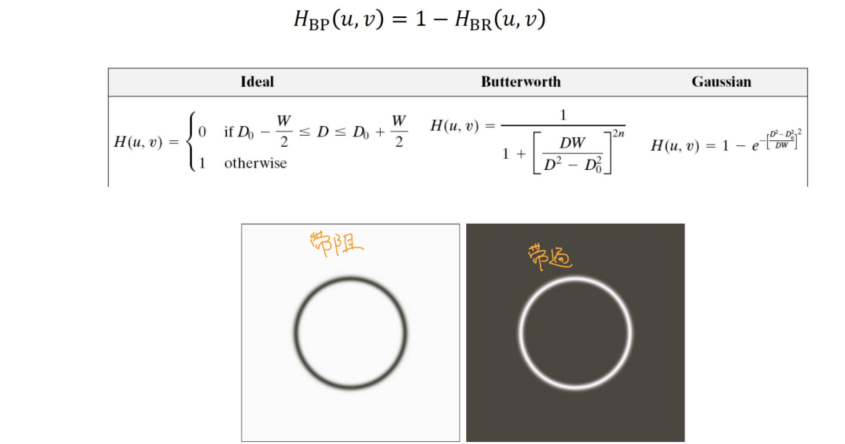
选择滤波(selective filtering)
- 带通(bandpass filter)
- 带阻(bandreject filter)
- 陷波器(Notch filter)
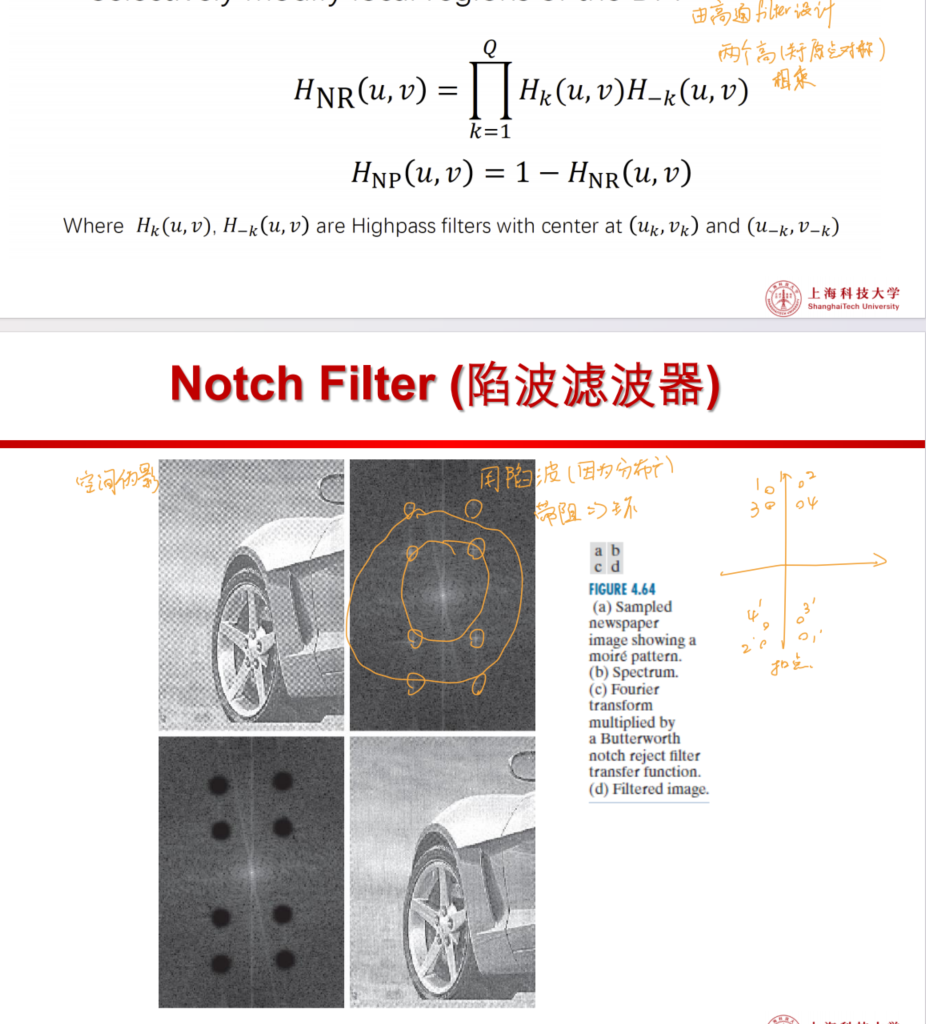
- 最佳陷波滤波器
-
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.