CV_learning_notes(2)
DIP Related Part
Filter
- Types of image
- Binary: 图像中每个像素的灰度值仅可取0或1,即不是取黑,就是取白,二值图像可理解为黑白图像
- Gray scale: 图像中每个像素的灰度值仅可取0或1,即不是取黑,就是取白,二值图像可理解为黑白图像
- Color: 每幅图像是由三幅灰度图像组合而成,依次表示红绿蓝三通道的灰度值,即我们熟知的RGB,此时彩色图像要视为三维的[height,width, 3]
- Filters
- Linear
- Box filter
- Gaussian filter
- How to choose kernel width
- rule of thumb: 设置滤波器的半宽度为3
- Non-linear
- Median filter
- Linear
- Kernel
- The kernel size should be odd, then it has a kernel center and a kernel radius
- The sum of all the elements in the kernel should be 1, otherwise,
- , the image becomes brighter
- , the image becomes darker
- After convolution, some values may be greater than 255 or less than 0, let the values be or
- Property
- 线性Linearity:
- Shift invariance:
- Separability
- speed up
- Convolution
- properties
- Commutative
- Associative
- Distributes over addition
- Scalars factor out
- • Identity
- properties
- Matlab parameter:
- edge padding method parameters
- wrap around(copy image)
circular - copy edge(extend)
replicate - reflect acorss edge(symmetry)
symmetric
- wrap around(copy image)
- edge padding method parameters
Edge-texture
- Edge detection
- Goal: Identify sudden changes (discontinuities) in an image.
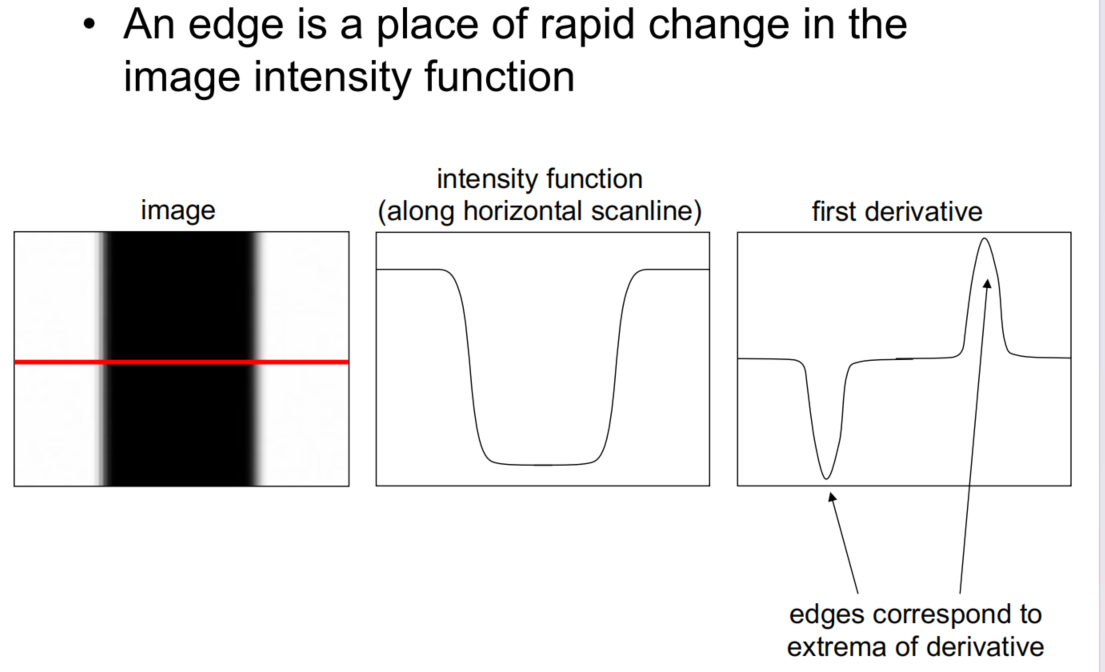
- 梯度Gradient: 对图片求微分的本质就是差分,而差分进一步可以看作为kernel去卷积
- 梯度的模:
All articles in this blog are licensed under CC BY-NC-SA 4.0 unless stating additionally.